Use of unmanned aerial vehicles for the diagnosis of parasitic plant infestation at the crown level in Pinus hartwegii
iForest - Biogeosciences and Forestry, Volume 16, Issue 5, Pages 282-289 (2023)
doi: https://doi.org/10.3832/ifor4002-016
Published: Oct 28, 2023 - Copyright © 2023 SISEF
Research Articles
Abstract
Forest degradation has increased in recent years due to biotic, abiotic, and anthropogenic factors. Parasitic plants are some of the main disturbance agents affecting forest resources. In temperate forests, the most frequent pest such as parasitic plants are from the genus Loranthaceae spp. Monitoring parasitic plants through traditional methods requires a large amount of time and human resources. Unmanned aerial vehicles (UAV) as a remote sensing tool have increased in popularity in different regions. UAV were used to assess the degree of infestation of Yellow Dwarf Mistletoe (YDM). In the present study, the presence of Yellow Dwarf Mistletoe (Arceuthobium globosum Hawksw. & Wiens) was identified using two information collection methods to estimate the level of infestation in a Pinus hartwegii Lindl. forest. First, the traditional method (Hawksworth) was used to estimate the degree of infestation per individual tree. Second, a remote sensing method using UAV was used to capture information at the crown level. Then, the Colorimetric Ranges at the Pixel Level (CRPL) method was used in conjunction with the decomposition of pixels with the RGB (Red-Green-Blue) model to define areas with the presence of infestation. The result of the methods was compared by calculating the pixels equivalence percentages identified as infested per level of infestation. The Hawksworth’s method was used by determining three levels: level 0 (healthy) = 0-2% pixels; Level 1 (medium) = 3-5% pixels; and Level 2 (high) ≥ 5% pixels. The methods coincided in detecting a high level of infestation while were biased in detecting healthy trees and low levels of infestation. Nonetheless, the remote sensing method using UAV remains a viable alternative in the monitoring of mistletoe for its capacity to present an overall diagnosis of the level of infestation.
Keywords
Pattern Recognition, CRPL Algorithm, Arceuthobium globosum, Remote Sensing
Introduction
Forest degradation has increased in recent years due to biotic and abiotic factors, but mainly due to anthropogenic activities such as infrastructure development, wood extraction, and agricultural expansion ([28]). All these factors have consequences in terms of loss of biodiversity and ecosystem services ([5]). At the same time, this process has been associated with an increase in tree mortality rates and in a decrease in tree growth, thus affecting forests composition, structure, and function ([11]).
Parasitic plants have a negative effect on the quality of forest resources, with the climate change favoring their establishment and expansion ([3], [49]), and increasing their frequency and severity. Worldwide, it is estimated that the increase in pest incidence and severity, forest fires and climate have generated a loss of 100 million hectares of forest areas. Moreover, forest insects and pests annually damage about 35 million hectares, especially in temperate and boreal zones ([17]) .
One of the most frequent plant health problems in temperate forests is the parasitic plant mistletoe (Loranthaceae spp.), which is considered the pest with the greatest extension worldwide ([19]). Due to its aggressiveness, it can cause the death of its host ([30]). For example, in the Nevado de Toluca Flora and Fauna Protection Area (NTFFPA) located in Central México, a Pinus hartwegii Lindl. population of approximately 13.000 ha ([43]) has been suffering a gradual fragmentation due to the increasing attack of pests and parasitic plants such as mistletoe ([14]).
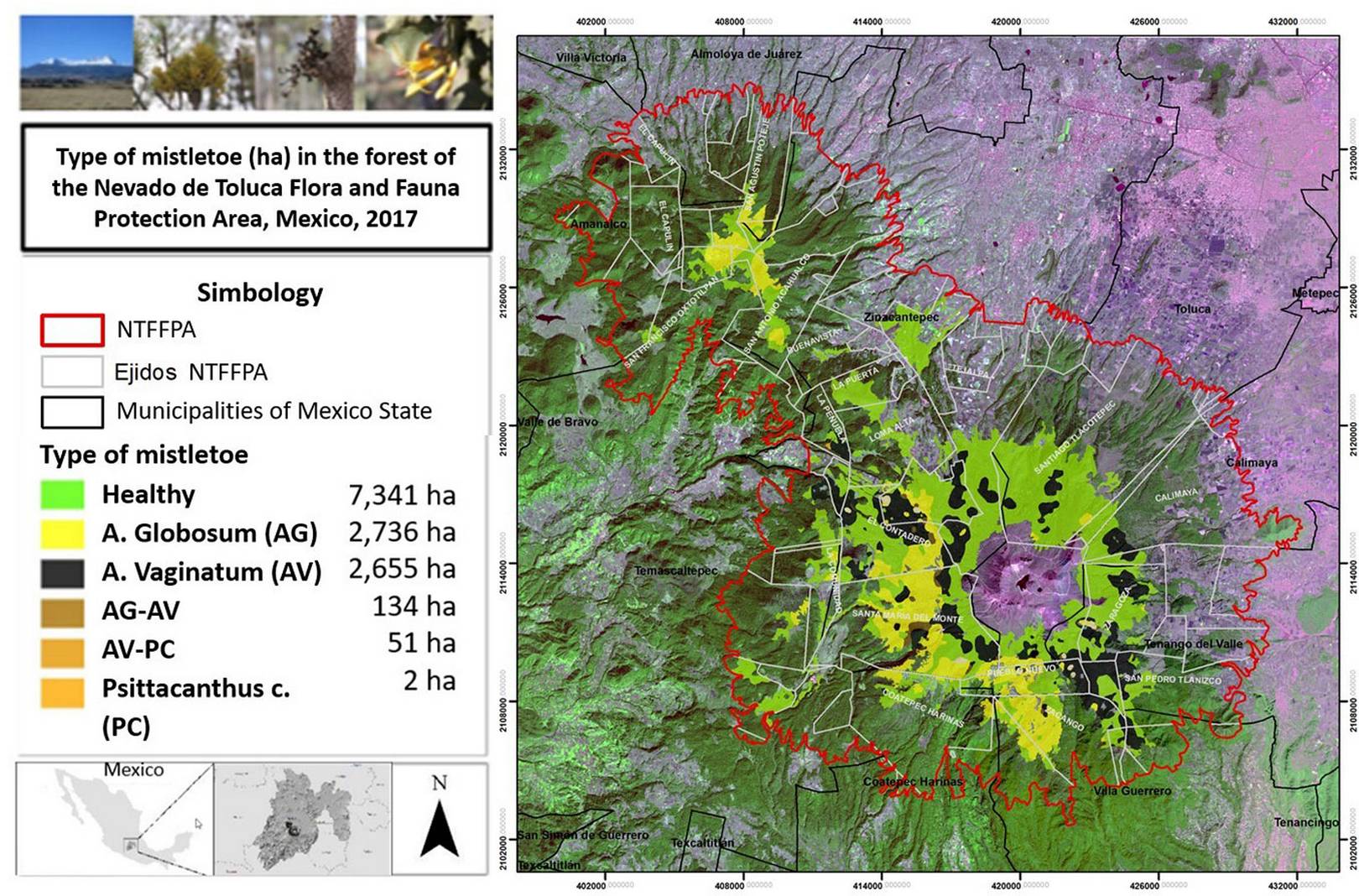
Three species of parasitic plants were identified in the NTFFPA: yellow dwarf mistletoe (YDM, Arceuthobium globosum grandicaule), black dwarf mistletoe (BDM, A. vaginatum vaginatum), and sacred fir dwarf mistletoe (SDM, A. abietis-religiosae). Black dwarf mistletoe has P. hartwegii as main host, and sacred fir dwarf mistletoe has a lesser extent in the area. Cedillo ([6]) reported that these parasitic plants affect 47% of the area of P. hartwegii forest, where YDM affects 2736 ha located between 3100 and 4000 m. a.s.l. and BDM affects 2655 ha located between 3400 and 3800 m. a.s.l. The propagation of the dwarf mistletoe requires an adequate density of tree hosts with a wide crown capable of intercepting the seeds. Indeed, seed dispersal distance does not usually exceed 14-15 m ([42]), though wind and fauna can disperse them over greater distances.
The use of remote sensing data in forestry aims to increase the cost effectiveness, accuracy, and timeliness of forest information ([32]). Photogrammetry and remote sensing are transforming the way data are acquired in forestry ([8]), e.g., the structure from motion (SfM) photogrammetry allows data collection with low cost and technical expertise ([23]). Monitoring and spatial studies have focused on the analysis of satellite images with high spatial resolution for measuring changes in forest cover ([29]), for taxonomic purposes ([38], [20]), forest health ([10], [48]), fire detection ([47]), or wildlife monitoring ([7]). However, the availability of images at specific times and finer spatial resolution (pixel <10 cm) can allow to capture more details in the canopy layer, including the presence of parasitic plants on tree crowns ([4], [13]).
The use of unmanned aerial vehicles (UAV) opens a new panorama for scientific research in the forestry sector. Images captured from UAVs can provide a more local perspective and more detailed information at tree level than satellite images ([21]), and therefore represents a precise way of monitoring pest and parasitic plant infestation at plot and individual level ([26]). Several studies support the use of UAV photogrammetry to enhance the acquisition of field data in forestry and in the analysis of pest infestation ([1], [21], [50], [2]), though they can not fully replace data from in situ ground surveys ([15]).
Recently, the use of UAV-captured images for monitoring parasitic plants was reported by Miraki et al. ([33]). Maes et al. ([31]) highlighted the potential of thermal remote sensing and UAV technology in quantifying mistletoe plants on tree canopy. Also, Dainelli et al. ([8]) and Duarte et al. ([13]) report an increasing number of studies using UAV platforms for data collection on forest insect pests in China and the United States, thus supporting the key role of UAV technology in the forestry sector as a tool for sustainable management. On the other hand, the usage of UAV technology still has several restrictions related to the lack of specialized sensors, as well as to the distance from the controlling console and the battery performances, which hinder its adoption for monitoring large-scale extensions of land ([38], [8]).
In this study, UAV were used to assess the degree of YDM infestation at the crown level in a P. hartwegii forest in Central Mexico. Images of trees were taken, and their pixels were classified into different infestation categories according to colorimetric and pattern recognition algorithms ([27]).
Materials and methods
Study area
The study was carried out in the Nevado de Toluca Flora and Fauna Protection Area (NTFFPA), a mountainous region in Central Mexico with an area of 53.590 ha ([12]). It is known as an aquifer recharge zone and for its natural resources, although it is experiencing degradation due to anthropic activities and other biotic and abiotic factors ([3], [14]). YDM is present in approximately 40% of the P. hartwegii area in NTFFPA (Fig. 1), mainly on northern slopes ([6], [40]). The pine forest in the NTFFPA is spatially distributed into dense forest (12%), semi-dense (50%) and fragmented (38% - [6]).
Fig. 1 - Infestation by parasitic plants in the Nevado de Toluca Flora and Fauna Protection Area. Source: Cedillo ([6]).
UAV data and classification method
The UAV Phantom 3 Standard™ (DJI, Shenzhen, China) was used as a remote sensing tool. It has a flight duration of 15 to 25 minutes and a camera integrated to a gimbal stabilization system that takes images of 4000 × 3000 pixels at a resolution of 16 megapixels. It is controlled from a remote control and the DJI GO mobile application developed by the manufacturer.
Photographs were captured by an UAV Sensor 1/2.3” CMOS Effective pixels:12 M, Lens FOV 94° 20 mm (35 mm format equivalent) f/2.8, image size 4000×3000) in October 2018. All photographs were taken at a height between 45 to 50 meters with spatial resolution of 3 cm per pixel with 95% frontal overlap. Images were taken with the sun at its highest point and an angle between 70° and 110°, favouring the conditions to reduce noise that affects photogrammetry, as suggested by Seifert et al. ([45]) and Dandois et al. ([9]).
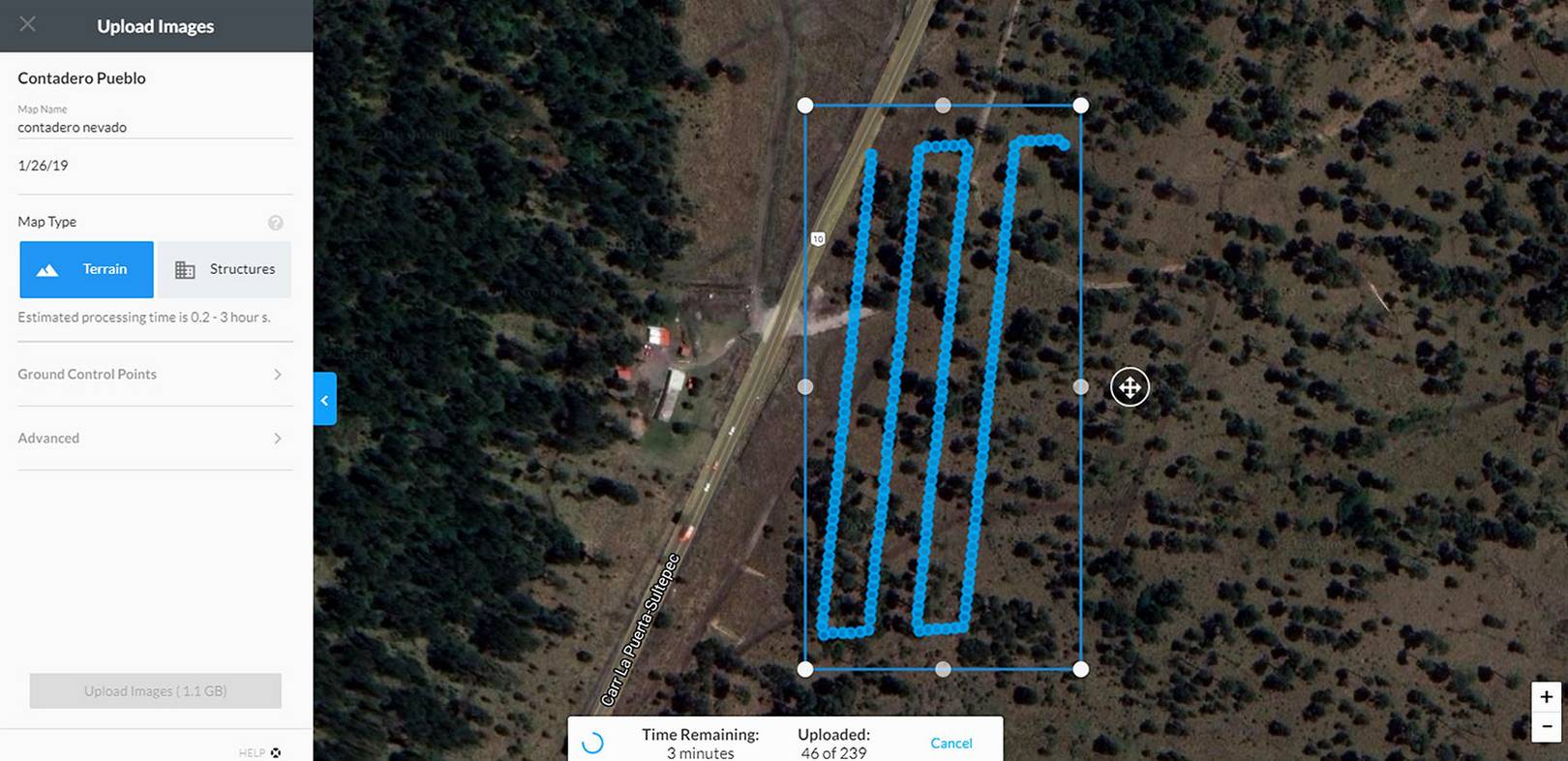
The flight height, the flight area, and the tour path were pre-programmed. To avoid collisions, the terrain slope was considered with respect to the maximum flight height. After flight execution, the programmed route in the software “DroneDeploye” was activated, and the remaining flight duration and progress were indicated in real time. Georeferenced photographs were captured at time lapses determined by the software to obtain the optimal image overlap. In the present case, 239 images were obtained in a plot of 2-ha, as shown in Fig. 2.
Fig. 2 - The flight plan over the selected plot.
The software Photoscan Professional v. 1.4 (Agisoft LLC, St. Petersburg, Russia) was used to generate an orthomosaic from the image bank obtained by the UAV. Four ground control points (GCPs) were used to correct the images planimetry and altimetry. The plot orthomosaic had a final spatial resolution of 3 cm per pixel.
The image acquisition period in October, coincides with drought season, thus vegetation has similar color tonalities as YDM. For this reason a white balance correction was performed on the orthomosaic to balance the levels of the basic red, green and blue colors, thereby the illumination was improved.
Both YDM and P. hartwegii were calibrated based on colorimetric ranges of 0-255 digital value (RGB) for applications of the Colorimetric Ranges at the Pixel Level (CRPL) method. The CRPL method was used to identify YDM elements in UAV images. For this, random pixels were selected from the object of study, which generated colorimetric ranges that were defined from maximum and minimum RGB values. The established ranges were analyzed using a validating program developed in Java™ that compares images pixel by pixel and the pixel matching to the target ranges ([27]).
The CRPL method for P. hartwegii identification was adapted considering random pixels from the canopy. The obtained P. hartwegii colorimetric ranges indicated that the subpixel Green (G) had the higher weight in color determination and was positively correlated with subpixel Red (R); finally, subpixel Blue (B) determined the brightness of the tones (Tab. 1).
Tab. 1 - RGB colorimetric range of pixels and separation between pixels G-R and G-B in Pinus hartwegii.
| Parameter | R | G | B |
|---|---|---|---|
| Max | 203 | 205 | 189 |
| Min | 72 | 83 | 30 |
| G-R Min | 0 | - | |
| G-R Max | 27 | - | |
| G-B Min | - | 8 | |
| G-B Max | - | 79 | |
The RGB colorimetric ranges shown in Tab. 1were used in the CRPL algorithm implementation to identify the range of pixels corresponding to the canopy cover, as shown in Fig. 3.
Fig. 3 - Identification of canopy cover in the orthomosaic.
A Java programming language software was used to generate a mass recognition pattern in the canopy with the k-nearest neighbors (KNN) algorithm, a supervised classification method according to the following formula (eqn. 1):
The value f(x) determines the most common value among the K closest neighbours to x, if K=1 is chosen; then the nearest neighbour to xi determines its value. The KNN algorithm indicates that if most of the k closest neighbors of a sample in the evaluated range belong to a specific category, then the sample also belongs to this category since it has similar characteristics ([16]), i.e., this method only determines the category to which the sample belongs based on the closest samples.
Forty-five patterns were used to identify the regions corresponding with the canopy. Once the regions in the orthomosaic were located, the CRPL algorithm was applied to obtain the presence of YDM in each region. The remaining pixels were rendered in grayscale.
Field data and Hawkswoth method
In the field census, 125 individual trees were recorded, all individuals of P. hartwegii with a diameter at breast height (DBH) greater than 7.5 cm in a 2-ha plot were sampled. The selected plot had a high YDM incidence and was directly surveyed around a central sampling point (19° 07′ 09.2″ N, 99° 49′ 14.7″ W) on the eastern slope of the NTFFPA ([6]).
The plot was segmented into two subplots of 50 × 200 m and were visited by two teams of three persons. The following variables were recorded during the sampling for each individual tree: (i) the tree height, obtained by a clinometer; (ii) the DBH measurement, taken with a diametric tape; (iii) the location of each individual tree, using the handheld GPS RINO® 750 average (margin of error = 3.65 m - Garmin, Olathe, KS, USA); and (iv) the YDM infestation level, following the Hawksworth method ([22]).
According to the Hawksworth Method, the trees were segmented into three parts and assigned different values: zero represented no presence of mistletoe, one indicated the presence of mistletoe, and two denoted mistletoe abundance. The sum of the three thirds determined the infestation level as zero was equivalent to healthy, ranges between one and two corresponded to a low infestation; ranges between three and four indicate a medium infestation, and ranges from five and six represented a high infestation ([22]).
Results
YDM identification by traditional method
The distribution of YDM infestation was obtained from the crown (upper third of P. hartwegii). According to the field data, 69.4% of total individuals were infested, of which 33.4% had a low infestation and 36% a high infestation based on the Hawksworth’s scale. The distribution of trees showing a low, medium, or high degree of infestation were dispersed heterogeneously across the sampling plot. However, small groupings were also observed in several regions formed by infested trees (with either low or high infestation). The fieldwork results showed an infestation pattern where larger trees had a greater presence of YDM mainly because their wider canopy, making them more prone to capture parasitic plant seeds. Furthermore, this coincided with the previous studies by Cedillo ([6]), who identified tree crown width as one of the main factors predisposing to infestation.
YDM infestation level identification by the CRPL-KNN algorithm
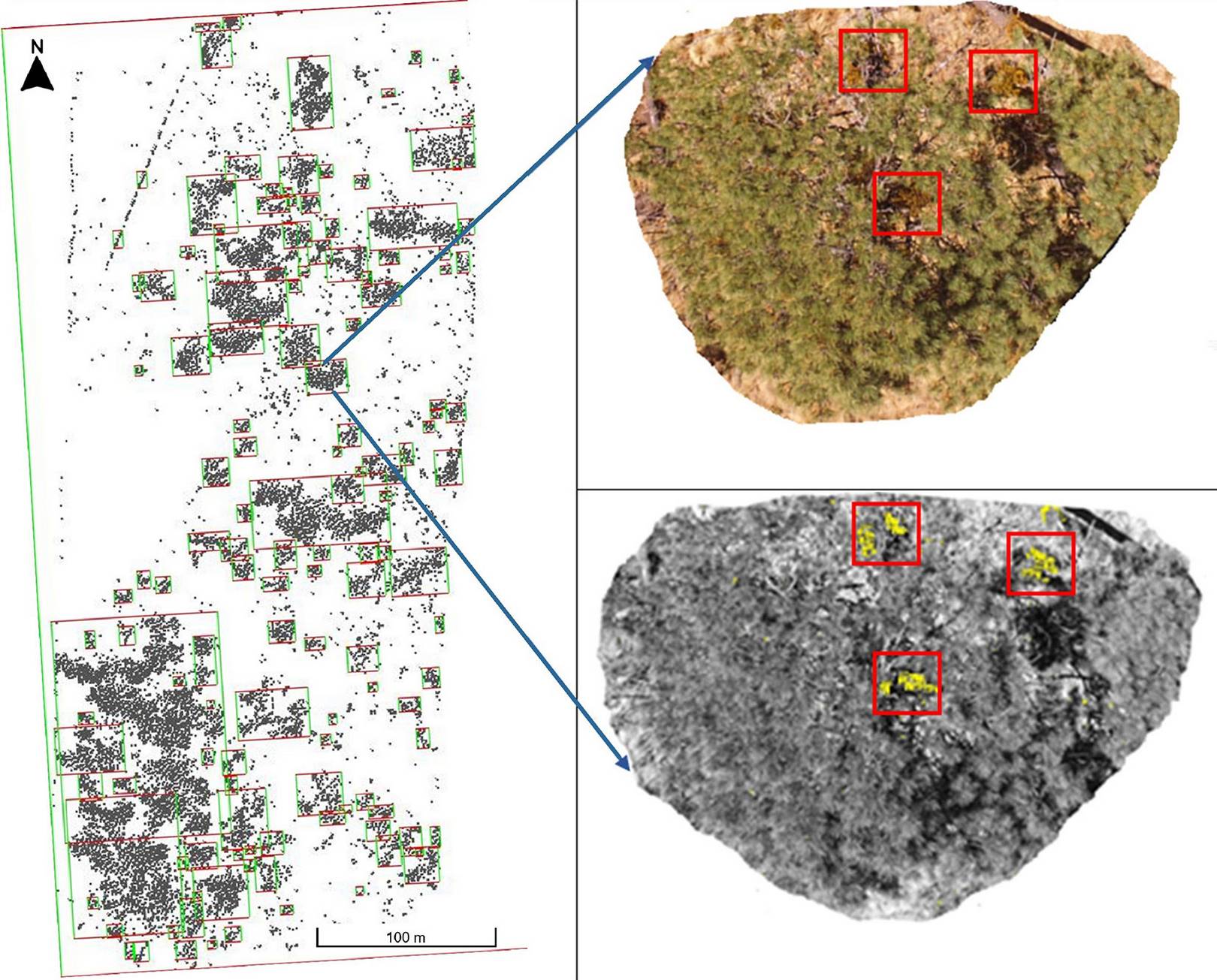
To improve the P. hartwegii patterns identification, the grayscale portion of the processed orthomosaic was eliminated, leaving only the pixels identified as the canopy. After executing the KNN classification algorithm, the RGB regions that delimit the presence of the canopy were determined, as shown in Fig. 4.
Fig. 4 - Regions defined by the KNN method.
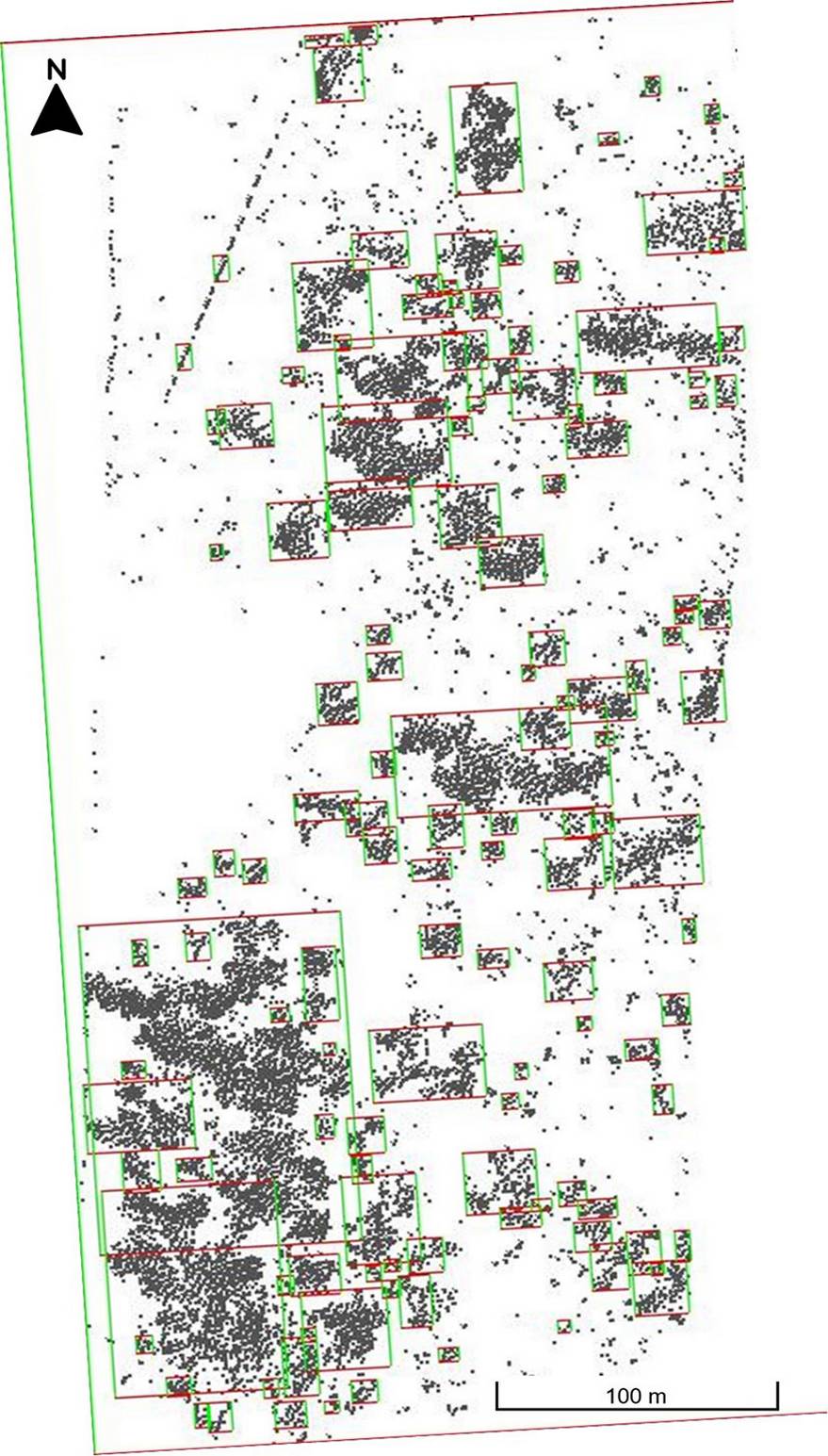
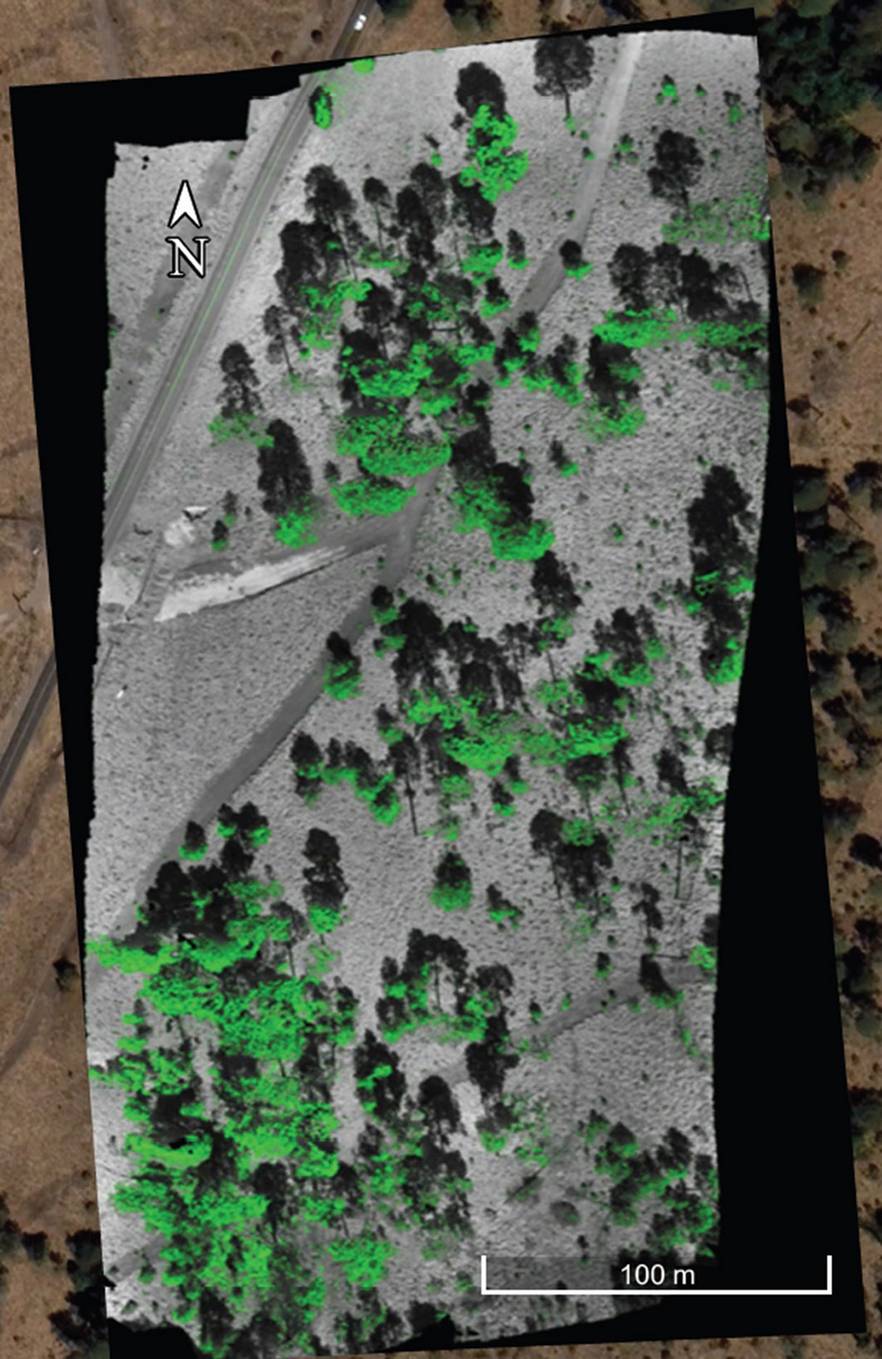
The KNN algorithm generated 59 regions, although these did not delimit individual trees. In some cases, overlapping canopies were generalized as a region and, in other cases, individual tree crowns were divided due to the presence of shade, mainly in adult trees with broad canopies. We classified the infestation level according to the YDM percentage present in a region, as shown in Fig. 5.
Fig. 5 - YDM Infestation in the study area based on the UAV CRPL + KNN method.
Given that each region is determined by the pixels identified as P. hartwegii canopy, the proportion of P. hartwegii pixels with respect to YDM pixels was calculated. The equivalence between the CRPL algorithm and Hawksworth’s scale was then determined in order to compare the results of each method, as shown in Tab. 2.
Tab. 2 - Hawksworth equivalence scale with CRPL percentages per region.
| Infestation level | Hawksworth | CRPL algorithm (%) |
|---|---|---|
| Healthy | 0 | 0-2 |
| Low | 1 | 3-5 |
| High | 2 | > 5 |
Furthermore, we converted the CRPL percentages per region to their Hawksworth equivalencies. The results indicated that the infestation levels obtained by the two methods coincided in the determination of high levels of infestation. However, a difference of 8 to 10 percentage points was found for lower levels of infestation and healthy regions, as shown in Tab. 3.
Tab. 3 - Percentage infestation by YDM.
| Parameters | Traditional Method | (KNN + CRPL) |
|---|---|---|
| Individuals | 125 | - |
| Regions | - | 59 |
| Healthy (%) | 30.4 | 40 |
| Low (%) | 33.6 | 25 |
| High (%) | 36 | 35 |
The regions identified in the orthomosaic had some overlap due to the presence of broader canopies that cover some portions of small individuals. This could have caused the differences between the two methods in the percentages of healthy individuals and those with a low level of infestation. However, even in the evaluation using the traditional method, the loss of details in the upper portion of the crown occurred, which can be compensated by the UAV method. In this context, the UAV method is still efficient in evaluating most of the crown cover.
Discussion
In the present study, remote sensing techniques by UAV were used in order to determine the YDM infestation level in the crown of a P. hartwegii stands. The algorithm (CRPL) was applied in conjunction with pattern recognition (KNN) to differentiate the pixels obtained as infested from the generated orthomosaics. This was facilitated by the high spatial resolution (<3 cm/pixel) of the photographs taken by the UAV. As highlighted by Fritz et al. ([18]), remote sensing by UAV enables individual trees and their canopy characteristics to be detected and analyzed.
The height of trees along with the slope of high mountainous terrain is a key factor in the remote sensing by UAV method. Singh & Frazier ([46]) mentioned that, to obtain a fine or ultrafine spatial resolution (<5 cm per pixel), 80% of studies on land needs to be carried out at a flight height <50 meters. We found that photographs taken from heights between 40 and 50 m above the ground allowed to achieve a spatial resolution of <5 cm per pixel. Meanwhile this was obtained planning the flight during periods of suitable meteorological conditions at the study area (e.g., minimum cloud cover, low wind intensity and with the sun at its highest point), thereby favoring the optimal photogrammetry processing.
The YDM phenological stages are also relevant given that its color may change between stages, resulting in different colorimetric characteristics compared to previous studies ([27]). A white balance of the orthomosaic was performed to facilitate the YDM identification. The seasons during which the color of YDM differs from its host would favor the identification of YDM, most notably either the flowering or the wet seasons ([41]).
P. hartwegii is an evergreen pine ([25]), and its multispectral footprint does not vary considerably across different seasons. Accordingly, the CRPL method is viable for the canopy cover identification of P. hartwegii throughout the year. When elements should be differentiated from their background environment based on their color, the use of CRPL algorithm has proven to be a viable discrimitation method ([27]).
It is worth noting that photographs were captured in sunny conditions. According to Näsi et al. ([34]), these conditions enable better reflectivity and therefore improve the results, though the CRPL method can be used to identify YDM under cloudy conditions as well.
Various multispectral classifications and specific pixel selection methods have been used to identify vegetation in previous studies ([24]). However, we used all pixels in the orthomosaic to perform the classification of YDM and P. hartwegii. Likewise, Puttonen et al. ([39]) indicated that using the entire color spectrum of the image is more effective for generating detailed classifications.
With respect to differences between the traditional Hawksworth method and remote sensing by UAV, the former contemplates the entire tree, whereas the UAV method focuses on the canopy only. However, identification of plant infestation by UAV is still acceptable because field data indicate that the 45% upper portion of the tree corresponds with the canopy in individuals with a DBH greater than 7.5. Finally, the traditional census results indicated that the first third of the stem (inferior trunk) of P. hartwegii trees had the least presence of YDM.
The Pinus hartwegii canopy layer is usually not very dense and this allows UAV to capture images of part of the interiors using diverse angles during its flying, thereby achieving fine details at the individual tree level. On the other hand, fine details may be loss when trees are clustered in space, due to partial cover of adjacent crowns or reciprocal shading.
Several classification methods, such as neural networks, random forest, k-means, and Support Vector Machine (SVM), can improve the detection of study objects in photogrammetric analyses ([37]). In this study, the KNN method was suitable to classify determined regions of P. hartwegii, limiting the area in which CRPL algorithm would be applied for YDM identification, thereby potentially reducing the number of pixels identified as false positives in comparison to previous studies.
The comparison of the traditional method to identify the YDM infestation level with the proposed remote sensing by UAV revealed a fairly good agreement between the two methods. Although the traditional method is not complex, it requires a large amount of human and economic resources, mainly in areas with complex topography (e.g., high mountain forests). Meanwhile, the UAV method is more complex in terms of the required algorithms and calibration; however, once calibrated, it can simply be applied to any orthomosaic obtained of the study area. However, we found non-negligible deviations between the two methods in the identification of healthy trees and those with a low level of infestation. These differences could be due to different factors, such as the shade of larger trees on smaller individuals which can reduce their visibility in remote sensed images, as well as the lateral tree crowns which are hardly detectable in clustered trees. On the other hand, the majority of YDM infestation is present in the upper portion of tree crowns, and this favours its detection in images taken with UAV platforms.
The UAV-based method used in this work can be implemented with low-cost equipment, without the need of specialized devices or highly-trained operators, providing an approximate assessment of parasitic plants. It can also be used in other studies in which a color difference exists between tree crowns and plant parasites that allows identifying the object of study within a spatial high resolution. Likewise, tests could be carried out with satellite image bands and formats that have a spatial ultra-fine resolution.
The UAV remote sensing techniques using the visible RGB spectrum are an alternative used in monitoring studies of forest insect pests and diseases ([13]). However, specialized sensors mounted on UAV (i.e., LIDAR, multispectral, hyperspectral and thermal sensors) with a greater number of bands may provide information that can improve the analysis of pests and parasitic plants in the forest, aimed at obtaining additional details of individual trees canopies, or measuring environmental variables (e.g., humidity, temperature, etc.) providing a different perspective on the infested hosts ([35], [36], [44]).
Conclusions
The use of UAV remote sensing methods to identify the YDM infestation level is a feasible alternative for monitoring parasitic plants in P. hartwegii forests, although it does not achieve the same level of detail as the traditional method relying on ground data. However, it can be used to identify strategic sites for preventative and/or corrective action plans, as this method considerably reduces the time required for data collection. The flight plan lasted approximately 15 minutes and required two people, whereas the field work had a duration of three hours and required a team of six people. Finally, the CRPL method was found to be adaptable in defining the colorimetric ranges for YDM in the crown of P. hartwegii, which vary across season. The use of such algorithms along with pattern recognition (KNN) is a viable technique for the identification of aboveground vegetation.
Several limitations of the presented method are the environmental conditions occuring during the flight, such as sunlight, cloud cover and wind intensity, the battery durability and the range of communication with the controlling console, that does not allow to cover large areas. On the other hand, UAV-based photogrammetry and analysis is an economical alternative that allows to calibrate methods for the detection of parasitic plants. In future studies it is recommended to use robust machine learning methods to improve the identification of parasitic plants, as well to improve data collection technologies to compare the extra details that can be attained with a larger number of spectral bands and improve the images quality to obtain a higher spatial resolution.
Abbreviations
The following abbreviations have been used throughout the paper:
- BDM: Black dwarf mistletoe (A. vaginatum vaginatum)
- CRPL: Colorimetric Ranges at the Pixel Level
- DBH: Diameter at breast height
- KNN: k-nearest neighbors
- NTFFPA: Nevado de Toluca Flora and Fauna Protection Area
- UAV: Unmanned aerial vehicles
- YDM; Yellow dwarf mistletoe (Arceuthobium globosum grandicaule)
Authors Contribution
LAL-B: desktop information analysis of desktop information and manuscript first draft; EGN-B: manuscript organization, planning and discussion; AREA: data collection planning in the field and analysis tools selection; WG-D: analysis and discussion of the information presentation in the document.
Acknowledgements
Support was provided by the National Council for Science and Technology (Consejo Nacional de Ciencia y Tecnología - CONACYT) for the Management Program for the Nevado de Toluca Flora and Fauna Protection Area (no. 3674/2014E).
The authors declare that there are no conflicts of interest.
References
CrossRef | Gscholar
Gscholar
CrossRef | Gscholar
Online | Gscholar
Online | Gscholar
CrossRef | Gscholar
Authors’ Info
Authors’ Affiliation
Angel R Endara-Agramont 0000-0001-8413-6551
E Gabino Nava-Bernal 0000-0001-9329-2265
William Gómez-Demetrio 0000-0002-7820-1967
Instituto de Ciencias Agropecuarias y Rurales - ICAR (México)
Tecnológico Nacional de México / TES de Valle de Bravo (México)
Corresponding author
Paper Info
Citation
León-Bañuelos LA, Endara-Agramont AR, Nava-Bernal EG, Gómez-Demetrio W (2023). Use of unmanned aerial vehicles for the diagnosis of parasitic plant infestation at the crown level in Pinus hartwegii. iForest 16: 282-289. - doi: 10.3832/ifor4002-016
Academic Editor
Davide Travaglini
Paper history
Received: Oct 21, 2021
Accepted: Aug 16, 2023
First online: Oct 28, 2023
Publication Date: Oct 31, 2023
Publication Time: 2.43 months
Copyright Information
© SISEF - The Italian Society of Silviculture and Forest Ecology 2023
Open Access
This article is distributed under the terms of the Creative Commons Attribution-Non Commercial 4.0 International (https://creativecommons.org/licenses/by-nc/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.

Web Metrics
Breakdown by View Type
Article Usage
Total Article Views: 18143
(from publication date up to now)
Breakdown by View Type
HTML Page Views: 13542
Abstract Page Views: 2533
PDF Downloads: 1668
Citation/Reference Downloads: 0
XML Downloads: 400
Web Metrics
Days since publication: 1002
Overall contacts: 18143
Avg. contacts per week: 126.75
Article Citations
Article citations are based on data periodically collected from the Clarivate Web of Science web site
(last update: Mar 2025)
(No citations were found up to date. Please come back later)
Publication Metrics
by Dimensions ©
Articles citing this article
List of the papers citing this article based on CrossRef Cited-by.
Related Contents
iForest Similar Articles
Review Papers
Remote sensing-supported vegetation parameters for regional climate models: a brief review
vol. 3, pp. 98-101 (online: 15 July 2010)
Review Papers
Accuracy of determining specific parameters of the urban forest using remote sensing
vol. 12, pp. 498-510 (online: 02 December 2019)
Review Papers
Remote sensing of selective logging in tropical forests: current state and future directions
vol. 13, pp. 286-300 (online: 10 July 2020)
Technical Reports
Detecting tree water deficit by very low altitude remote sensing
vol. 10, pp. 215-219 (online: 11 February 2017)
Short Communications
Local spread of an exotic invader: using remote sensing and spatial analysis to document proliferation of the invasive Asian chestnut gall wasp
vol. 5, pp. 255-261 (online: 24 October 2012)
Research Articles
Identification of wood from the Amazon by characteristics of Haralick and Neural Network: image segmentation and polishing of the surface
vol. 15, pp. 234-239 (online: 14 July 2022)
Review Papers
Remote sensing support for post fire forest management
vol. 1, pp. 6-12 (online: 28 February 2008)
Research Articles
Afforestation monitoring through automatic analysis of 36-years Landsat Best Available Composites
vol. 15, pp. 220-228 (online: 12 July 2022)
Research Articles
Assessing water quality by remote sensing in small lakes: the case study of Monticchio lakes in southern Italy
vol. 2, pp. 154-161 (online: 30 July 2009)
Technical Reports
Remote sensing of american maple in alluvial forests: a case study in an island complex of the Loire valley (France)
vol. 13, pp. 409-416 (online: 16 September 2020)
iForest Database Search
Search By Author
Search By Keyword
Google Scholar Search
Citing Articles
Search By Author
Search By Keywords
PubMed Search
Search By Author
Search By Keyword







