Fuel type characterization based on coarse resolution MODIS satellite data
iForest - Biogeosciences and Forestry, Volume 1, Issue 1, Pages 60-64 (2008)
doi: https://doi.org/10.3832/ifor0451-0010060
Published: Feb 28, 2008 - Copyright © 2008 SISEF
Research Articles
Abstract
Fuel types is one of the most important factors that should be taken into consideration for computing spatial fire hazard and risk and simulating fire growth and intensity across a landscape. In the present study, forest fuel mapping is considered from a remote sensing perspective. The purpose is to delineate forest types by exploring the use of coarse resolution satellite remote sensing MODIS imagery. In order to ascertain how well MODIS data can provide an exhaustive classification of fuel properties a sample area characterized by mixed vegetation covers and complex topography was analysed. The study area is located in the South of Italy. Fieldwork fuel type recognitions, performed before, after and during the acquisition of remote sensing MODIS data, were used as ground-truth dataset to assess the obtained results. The method comprised the following three steps: (I) adaptation of Prometheus fuel types for obtaining a standardization system useful for remotely sensed classification of fuel types and properties in the considered Mediterranean ecosystems; (II) model construction for the spectral characterization and mapping of fuel types based on two different approach, maximum likelihood (ML) classification algorithm and spectral Mixture Analysis (MTMF); (III) accuracy assessment for the performance evaluation based on the comparison of MODIS-based results with ground-truth. Results from our analyses showed that the use of remotely sensed MODIS data provided a valuable characterization and mapping of fuel types being that the achieved classification accuracy was higher than 73% for ML classifier and higher than 83% for MTMF.
Keywords
Introduction
Fires can cause permanent changes in the composition of vegetation community, decrease in vegetational covers, loss of biodiversity, soil degradation, alteration of landscape patterns and ecosystem functioning thus speeding desertification processes up. Furthermore, fires can contribute to alien plant invasion, patch homogenization, and create positive feedbacks in future fire susceptibility, fuel loading, fire spreading and intensity. Wildland fires are considered one of the most important disturbance factors in the natural ecosystems of the Mediterranean regions, where every year, around 45000 forest fires break out causing the destruction of about 2.6 million hectares ([12]). Several studies ([26]) dealing with the effects of fires on the vegetation within the Mediterranean basin found that fires induce significant alterations in short as well as long-term vegetation dynamics.
Prevention measures, together with early warning and fast extinction, are the only methods available that can support fire fighting and limit damages caused by fires especially in regions with high ecological value, dense populations, etc. In order to limit fire damage, fire agencies need to have effective decision support tools that are able to provide timely information for quantifying fire risk. In particular, fire managers need information concerning the distribution, amount and condition of fuels in order to improve fire prevention and modelling fire spreading and intensity. Geographic Information Systems (GIS) and Remote Sensing (RS) are considered useful tools for supporting prevention activities ([9]). Remote sensing can provide valuable data on type (namely distribution and amount of fuels) and status of vegetation in a consistent way at different spatial and temporal scales. Since the description of fuel proprieties is usually very complex, fire managers have tried to summarize the physical parameters and spatial distribution of fuel in different classes also known as “fuel models” ([2], [5]). More specifically, a fuel model has been defined as "an identifiable association of fuel elements of distinctive species, form, size, arrangement, and continuity that will exhibit characteristic fire behaviour under defined burning conditions" ([19]). The spatial distribution of the fuel characteristics can be displayed as fuel type maps.
Northern Forest Fire Laboratory (NFFL) system ([1]) is the most common and well-know fuel model that was developed taking the vegetation structure and characteristic of the North-American floras in to account. Recently, in the framework of the Prometheus project (1999), a new fuel type classification system was specifically developed to better represent the fuel characteristic of the Mediterranean ecosystems (http://kentauros.rtd.algo.com.gr/promet/index.htm, Algosystems SA, Greece). This classification is principally based on the height and density of fuel, which directly influence the intensity and propagation of wildfire (Tab. 1).
Tab. 1 - Fuel types classification (Prometheus S.V. Project 1999).
| 1 | Ground fuels (cover >50%) | Grass |
|---|---|---|
| 2 | Surface fuels (shrub cover >60%, tree cover < 50%) | grassland, shrubland (smaller than 0.3-0.6 m and with a high percentage of grassland), and clearcuts, where slash was not removed |
| 3 | Medium-height shrubs (shrub cover >60%, tree cover < 50%) | shrubs between 0.6 and 2.0 m |
| 4 | Tall shrubs (shrub cover >60%, tree cover < 50%) | high shrubs (between 2.0 and 4.0 m) and young trees resulting from natural regeneration or forestation |
| 5 | Tree stands (>4 m) with a clean ground surface (shrub cover < 30%) | the ground fuel was removed either by prescribed burning or by mechanical means. This situation may also occur in closed canopies in which the lack of sunlight inhibits the growth of surface vegetation |
| 6 | Tree stands (>4 m) with medium surface fuels (shrub cover >30%) | the base of the canopies is well above the surface fuel layer (>0.5 m). The fuel consists essentially of small shrubs, grass, litter, and duff |
| 7 | Tree stands (>4 m) with heavy surface fuels (shrub cover >30%) | stands with a very dense surface fuel layer and with a very small vertical gap to the canopy base (< 0.5 m) |
Due to the complex nature of fuel characteristic a fuel map is considered one of the most difficult thematic layers to build up ([15]) especially for large areas. Aerial photos have been the most common remote sensing data source traditionally used ([20], [21], [22]) for mapping fuel types distribution. Nevertheless, remote sensing multispectral data can be an effective data source available at different temporal and spatial scales that can be fruitfully adopted for building up fuel type maps from global, region down to local scale. For this purpose, up to now, several satellite sensors have been used in last decades. For example, NOAA-AVHRR (Advanced Very High Resolution Radiometer) data were used by McKinley et al. ([18]) for mapping fuel types in western United States. Landsat Thematic Mapper data were used for mapping fuels models in Yosemite national Park, USA ([25]), and in Spain ([10], [23], [24]). A multisensor approach based on Spot and Landsat imager was adopted by Castro & Chuvieco ([6]) to perform a classification of fuel types for Chile by using an adapted version of Anderson’s system. The accuracies obtained from these researches ranged from 65% to 80% ([7]). The accuracy level is strongly related with fuel presence and spatial distribution (how many and where) and with specific environmental conditions (topography, land cover heterogeneity, etc.). The importance of using multisensor data source to map fuel model was emphasised by many authors ([16]).
Although the recognized feasibility of satellite sensors traditionally used for the remote characterization of fuel types, the advent of new sensors with improved spatial and spectral resolutions may improve the accuracy ([8]) and reduce the cost of forest fire fuel mapping. Up to now, fire researchers did not paid enough attention to the potentiality of using remote sensing MODIS data to map fuel types and properties.
This research aims to investigate the usefulness of coarse scale satellite data, such as MODIS imagery, to characterize and map fuel types in fragmented ecosystems. This objective is achieved by using Prometheus model coupled with MODIS data that were analysed by using Maximum Likelihood (ML) classifier and Spectral Mixture Analysis (MTMF) for a test case (located in the south of Italy) that is highly representative of Mediterranean like ecosystems.
Study area
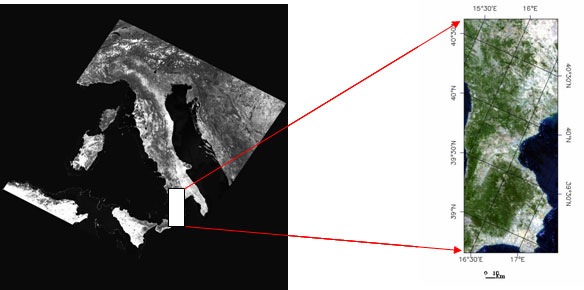
The selected study area (Fig. 1) is located in the South of Italy. The study area extends over a territory of about 800000 hectares in the Basilicata and Calabria Regions. It constitutes a complex morphological unit and it is characterized by complex topography with altitude varies from 0 to 2300 m above sea level (a.s.l.) and mixed vegetation covers. Between 0 to 600 m a.s.l., natural vegetation constituted by Mediterranean scrubs and sclerophyllus vegetation is prevailing. From 600 to 1000-1200 m a.s.l. the vegetation is prevailing constituted by extensive populations of Quercus pubescens and woods of Turkey oaks (Quercus cerris). Degradation forms are evident, here present as xerophytic prairies and substitution bushes. The higher horizons are constituted by beech woods (Fagus sylvatica) which arrive up to the 1900 meters a.s.l. of altitude. In the Sila area (mountainous system of region), between 1000 and 1900 m a.s.l., the more diffuse and important specious is the Calabrian Laricio pine (Pinus Nigra var. calabrica).
Fig. 1 - Study area: (A) Location of the study area in MODIS image July 2003 band 1 (red); (B) RGB composition (bands 1-4-3) of MODIS spectral channels for the study area.
Materials and methods
Dataset MODIS
MODIS (Moderate Resolution Imaging Spectroradiometer) is a key instrument aboard the and satellites. Terra’s orbit around the Earth is timed so that it passes from north to south across the equator in the morning, while Aqua passes south to north over the equator in the afternoon. Terra MODIS, launched on December 18, 1999 and Aqua MODIS, launched on May 4, 2002, are viewing the entire Earth’s surface every 1 to 2 days, acquiring data in 36 spectral bands, or groups of wavelengths. These data will improve our understanding of global dynamics and processes occurring on the land, in the oceans, and in the lower atmosphere. MODIS is playing a vital role in the development of validated, global, interactive Earth system models able to predict global change accurately enough to assist policy makers in making sound decisions concerning the protection of our environment.
The MODIS instrument provides high radiometric sensitivity (12 bit) in 36 spectral bands ranging in wavelength from 0.4 µm to 14.4 µm. The responses are custom tailored to the individual needs of the user community and provide exceptionally low out-of-band response. Two bands are imaged at a nominal resolution of 250 m at nadir, with five bands at 500 m and the remaining 29 bands at 1 km. A ± 55-degree scanning pattern at the EOS orbit of 705 km achieves a 2330-km swath and provides global coverage every one to two days.
The MODIS bands used in this work (Tab. 2) are the first seven corresponding to a spatial resolution of 250 and 500 m: this choice was performed because these spectral bands are suitable for the study of vegetation characteristics. The MODIS data used for this study were acquired on July, 2003.
Tab. 2 - Modis spectral bands.
| Bands | Lower edge µm |
Upper edge µm |
Pixel Resolution (m) |
|---|---|---|---|
| 1 | 0.62 | 0.67 | 250 |
| 2 | 0.84 | 0.88 | 250 |
| 3 | 0.46 | 0.48 | 500 |
| 4 | 0.545 | 0.565 | 500 |
| 5 | 1.230 | 1.250 | 500 |
| 6 | 1.628 | 1.652 | 500 |
| 7 | 2.105 | 2.155 | 500 |
Additionally, photos and air photos were obtained for the investigated area immediately before and after the acquisition of satellite MODIS data. Fieldwork fuel typing were performed using a global position system (GPS) for collecting geopositional data (latitude and longitude). Air photos and fieldwork fuel types were used as a ground-truth dataset firstly to identify the fuel types defined in the context of Prometheus system, and secondly, to evaluate performance and results obtained for the considered test area from the MODIS data processing.
Prometheus adaptation
Only natural vegetated areas were considered for the fuel type characterization. The seven fuel type classes standardized in the context of Prometheus system (Tab. 3) were detailed identified and carefully verified for the study area on the basis of field works performed before, during and after the acquisition of MODIS remote sensing data. In particular, photos and air photos, taken for the investigated region immediately before and after the acquisition of MODIS data, along with the fuel types recognized in the field were used for this purpose. Fig. 2 shows the results obtained from the adaptation of Prometheus system to the characteristics and properties of fuel types present in the investigated test area. Significant patches corresponding to areas representative for each fuel class were carefully identified over the MODIS images by using geo-position data (latitude and longitude) collected during the ground surveys by means of a GPS positioning system. Pixels relating to these areas were exploited for performing the selection of adequate Region of Interest point (Ground-Truth dataset) for the seven classes (fuel types) with the addition of 1 class concerning areas having no Fuel. The sample points of Ground-Truth dataset were selected in the same areas subject to direct check on field in order to be used firstly to identify the fuel types defined in the context of Prometheus system, and secondly, to evaluate performance and results obtained for the considered test area from the MODIS data processing. For this reason, pixels corresponding to the given Ground-Truth areas were subdivided in to testing data and training data through randomization of the pixels to 50% for every class.
Tab. 3 - Fuel type and vegetation typologies adapted from Prometheus system for the study area.
| Fuel | Plowed and bare soils |
|---|---|
| No fuel | Woody cultivations |
| Sowed lands | |
| Calcareous cliffs and detritus | |
| Sea, course and water bodies | |
| fuel type 1 | Natural grassland and pastures |
| fuel type 2 | Moors, Uncultivated soils, Substitution bushes, Shrubby grassland, Garigues |
| fuel type 3 | Moors, Uncultivated soil, Substitution bushes, Shrubby grassland, Garigues |
| fuel type 4 | Sclerophyllus vegetationMediterranean shrubs |
| fuel type 5 | Coniferous forestBeech forestBroad- leaved mixed forest |
| fuel type 6 | Broad-leaved mixed forest |
| fuel type 7 | Broad-leaved mixed forestTransitional woodland-scrub |
Fig. 2 - Fuel maps obtained from the processing of MODIS data: (A) Modis ROI; (B) Modis ML classification; (C) Modis MTMF classification.
Model construction and comparison
The mapping of fuel types was obtained by using both a supervised classification based on Maximum Likelihood (ML) algorithm and Spectral Mixture Matched Filtering (MTMF). The ML classifier is considered one of the most important and well-known image classification methods due to its robustness and simplicity. It is wide used in vegetation and land cover mapping. Moreover, it was also tested for fuel model distribution ([23]). The ML method quantitatively evaluates the variance and covariance of the spectral signatures when classifying an unknown pixel assuming at the same time a Gaussian distribution of points forming a cluster of a vegetation class. Under this assumption the distribution of a class is described by the mean vector and covariance matrix which is used to compute the statistical probability of a given pixel value being a member of a particular class. The probability for each class is calculated and the class with the highest probability is assigned the pixel ([17]). As above reported, the ML classifier is based on the assumption that different variables used in the computation are normally distributed. This assumption is generally considered acceptable for common spectral response distribution, but it could be untenable in mixed land cover compositions. In this conditions, as pixels increase in size, the proportion of mixed cover type distributed at pixel level will likewise increase and information at the sub-pixel level will be of increasing interest. Consequently, in fragmented landscapes conventional “hard” image classification techniques provide only a poor basis for the characterization and mapping of fuel types giving, in the best case, a compromised accuracy, or, in the worst case, a totally incorrect classification.
In these conditions, the use of spectral mixture analysis (MTMF) can reduce the uncertainty in hard classification techniques since it is able to capture, rather than ignore, subpixel heterogeneity. The MTMF allows for classifying the proportions of the ground cover types (end-member classes) covered by each individual pixel. End-member classes can be taken from “pure” pixels within an image or from spectral libraries. Over the years, different models of spectral mixtures have been proposed ([14]). Among the available models, the most widely used is the Mixture Tuned Matched Filtering (MTMF - [13], [4], [3]) that is based on the assumption that the spectrum measured by a sensor is a linear combination of the spectra of all components within the pixels.
In our case, on the basis of ground surveys and air photos, we selected the Region Of Interest (ROI) corresponding to the considered seven fuel types, plus 1 additional class related to no fuel regions. Pixels belonging to each of the considered ROI were randomly separated into training data and testing data, used for the both the classification (ML and MTMF) and accuracy evaluation.
Results
The Fig. 2 shows the mapping of fuel types obtained for the investigated test area from the MODIS images. Such map presents very high user’s accuracy. For the accuracy assessment we consider the producer accuracy, user accuracy, and overall accuracy, that are defined as follows.
The producer’s accuracy is a measure indicating the probability that the classifier has correctly labelled an image pixel, for example, into Fuel Type 1 class given that, on the basis of ground recognition such a pixel belongs to Fuel Type 1 class. The user’s accuracy is a measure indicating the probability that a pixel belongs to a given class and the classifier has labelled the pixel correctly into the same given class. The overall accuracy is calculated by summing the number of pixels classified correctly and dividing by the total number of pixels. Finally, the kappa statistics (K) was also considered. It measures the increase in classification accuracy over that of pure chance by accounting for omission and commission error ([11]). Overall accuracy is computed as the sum of the number of observations correctly classified (class1, as class 1, class 2 as class 2, etc.) divided by the total number of observations. This is equivalent to the “diagonal” of a square contingency table matrix divided by the total number of observations described in that contingency table ([11]).
The Tab. 4 shows the accuracy coefficients. Results from our analyses showed that the use of remotely sensed MODIS data provided a valuable characterization and mapping of fuel types being that the achieved classification accuracy was higher than 73% for ML classifier and higher than 83% for MTMF.
Tab. 4 - Accuracy levels from MLC and MTMF.
| Class | MCL | MTMF | ||
|---|---|---|---|---|
| Producer Accuracy (%) |
User Accuracy (%) |
Producer Accuracy (%) |
User Accuracy (%) |
|
| Fuel type 1 | 89.74 | 71.43 | 76.92 | 100.00 |
| Fuel type 2 | 82.26 | 68.00 | 80.65 | 73.53 |
| Fuel type 3 | 62.77 | 36.65 | 75.53 | 52.99 |
| Fuel type 4 | 92.06 | 85.29 | 92.06 | 89.23 |
| Fuel type 5 | 76.87 | 62.09 | 80.95 | 80.41 |
| Fuel type 6 | 67.37 | 77.56 | 81.36 | 82.76 |
| Fuel type 7 | 48.39 | 63.83 | 56.45 | 81.40 |
| No fuel | 77.26 | 97.23 | 91.69 | 95.66 |
| - | Overall Accuracy = 73.83 % Kappa Coefficient = 0.6763 |
Overall Accuracy = 83.63 %Kappa Coefficient = 0.7924 |
||
Using the MTMF classification the producer accuracy values improved compared to those obtained from the ML classification for six of the eight considered fuel classes (Tab. 5). In particular, the biggest improvements were in correspondence of fuel type 3 (12.76%), fuel type 6 (13.99%) and no fuel (14.43%). The decrease for fuel type 2 was very low (1.61%), while fuel type 1 decreases of 12.82 percentage points. The user accuracy also increased. In particular, the most significant improvements are for fuel type 1 (28.57%), fuel type 5 (18.32%), fuel type 7 (17.57%) and fuel type (16.34%). The decrease for no fuel class is insignificant.
Tab. 5 - Change in classification matrix.
| Class | User Acc. MLC | User Acc. MTMF | Change User Acc. | Prod. Acc. MLC | Prod. Acc. MTMF | Change Prod. Acc. |
|---|---|---|---|---|---|---|
| Fuel type 1 | 71.43 | 100.00 | 28.57 | 89.74 | 76.92 | -12.82 |
| Fuel type 2 | 68.00 | 73.53 | 5.53 | 82.26 | 80.65 | -1.61 |
| Fuel type 3 | 36.65 | 52.99 | 16.34 | 62.77 | 75.53 | 12.76 |
| Fuel type 4 | 85.29 | 89.23 | 3.94 | 92.06 | 92.06 | 0.00 |
| Fuel type 5 | 62.09 | 80.41 | 18.32 | 76.87 | 80.95 | 4.08 |
| Fuel type 6 | 77.56 | 82.76 | 5.20 | 67.37 | 81.36 | 13.99 |
| Fuel type 7 | 63.83 | 81.40 | 17.57 | 48.39 | 56.45 | 8.06 |
| No fuel | 97.23 | 95.66 | -1.57 | 77.26 | 91.69 | 14.43 |
As a whole, results from this preliminary analysis showed that the use of unmixing technique allows an increase in accuracy at around 10% for both the overall accuracy and the Kappa Statistic (k) compared to the accuracy level obtained by applying a widely used classification algorithm. Such results indicate that both the classification and spectral unmixing methods can produce reasonably accurate mapping of fuel type.
The mistakes of classification, their attribution in the different classes and the importance of the unmixing, can be verified in the following comparisons:
- In MLC No fuel class and Ft3 present a high Mixing what consists in a very strong pixel “transfer” (83 pixel) from No Fuel toward Fuel type 3, due above all to mistakes of selection of the ROI. MTMF, even if not removing the mistake, decreases the “transfer” to 33 pixels and so of beyond 60%.
- In MLC, Ft5 and Ft6 present a high “exchange” of pixel because the Classifier “moves” 19.73% of the pixels attributed in the Ground-Truth Dataset to Fuel type 5 toward Fuel type 6 and 22% to Fuel type 6 toward Fuel type 5. The mistake goes above all attributed what to the difficulty to select distinct Ground-Truth Points for the two classes, which are very like as regards the vegetational characteristics, being different above all on the structural plan. In this case MTMF decreases the mistake of beyond 40%.
- In MLC Ft5 e Ft7 show a very high mixing that consist in a “transfer” of pixel from Ft7 to Ft5 equivalent to 27.42% of the pixels attributed in the Ground-Truth Dataset to Fuel type 7. Also in this case the mistake goes above all attributed what to the difficulty to select distinct Ground-Truth Points for the two classes, which are very like as regards the vegetational characteristics, for some of the typologies included in two classes. MTMF decreases the “transfer” from 17 to 6 pixels with an improvement, therefore, of almost 65%.
- In MLC there is a moderate mixing between Ft7 and Ft4 which share some vegetational typologies; in the specific case the classifier “moves” 11.29% of the pixels attributed in the Ground-Truth Dataset to Fuel type 7 toward Ft4. MTMF decreases the "transfer" with an improvement of beyond 40%.
- In MLC No fuel and Ft1 show a moderate mixing with an “exchange” equivalent to 12 pixels probably because there is a presence of typical grass species in a few cultivated areas. MTMF decreases the mistake to 7 pixels with an improvement of beyond 40%.
- Instead, the improvements in the Mixing levels between Ft2 and Ft3 are much less clear. In MLC between two classes, which, to the Modis spatial resolution can be differentiated almost exclusively on the structural plan, there is a very high (27) “exchange” of pixels. MTMF decreases the mistake only by 18%. The same consideration can be done for Ft6 and Ft7 in which the improvement is of 25%.
- The only negative comparison is between Ft3 and Ft6 in which MTMF as regards MLC provides a worse result of almost 40%, probably because the Unmixing underlines the mistakes already present in the step of selection of the ROI.
Conclusions
Multispectral MODIS data were analysed for a test area of southern Italy to ascertain how well coarse remote sensing data can characterize fuel type and map fuel properties. Fieldwork fuel type recognitions, performed at the same time as remote sensing data acquisitions, were used as ground-truth dataset to assess the results obtained for the considered test area. Results from our analyses showed that the use of remotely sensed MODIS data provided a valuable characterization and mapping of fuel types being that the achieved classification accuracy was higher than 73% for ML classifier and higher than 83% for MTMF.
Thus, showing that the use of an unmixing technique allows an increase in accuracy of around 10% compared to the accuracy level obtained by applying a widely used hard classification algorithm. Both the classification and the spectral unmixing methods can produce reasonably accurate mapping of fuel type. Nevertheless, it is more challenging to use the spectral unmixing techniques to derive fuel type mapping at the subpixel scale.
Results obtained from these investigations can be directly extended to Mediterranean like ecosystems.
The approach proposed in this work can be fruitfully applied to different remote sensed data, such as Quickbird, Ikonos, SPOT, ASTER, Landsat Thematic Mapper, or Enhanced Thematic Mapper, NOAA- AVHRR, SPOT-VEGETATION, characterized by different spatial and spectral resolution for mapping fuel properties at different spatial scale from landscape to regional level.
References
Gscholar
Gscholar
Gscholar
Gscholar
Gscholar
Gscholar
Gscholar
Gscholar
Gscholar
Gscholar
Gscholar
Gscholar
Gscholar
Gscholar
Authors’ Info
Authors’ Affiliation
R Lasaponara
Italian National Council of Research (CNR), Institute of Methodologies of Environmental Analysis, C. da S. Loja, I-85050, Tito Scalo, PZ (Italy)
Corresponding author
Paper Info
Citation
Lanorte A, Lasaponara R (2008). Fuel type characterization based on coarse resolution MODIS satellite data. iForest 1: 60-64. - doi: 10.3832/ifor0451-0010060
Paper history
Received: Feb 16, 2006
Accepted: Apr 23, 2007
First online: Feb 28, 2008
Publication Date: Feb 28, 2008
Publication Time: 10.37 months
Copyright Information
© SISEF - The Italian Society of Silviculture and Forest Ecology 2008
Open Access
This article is distributed under the terms of the Creative Commons Attribution-Non Commercial 4.0 International (https://creativecommons.org/licenses/by-nc/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.

Web Metrics
Breakdown by View Type
Article Usage
Total Article Views: 58795
(from publication date up to now)
Breakdown by View Type
HTML Page Views: 47483
Abstract Page Views: 3767
PDF Downloads: 6183
Citation/Reference Downloads: 69
XML Downloads: 1293
Web Metrics
Days since publication: 6708
Overall contacts: 58795
Avg. contacts per week: 61.35
Article Citations
Article citations are based on data periodically collected from the Clarivate Web of Science web site
(last update: Mar 2025)
Total number of cites (since 2008): 7
Average cites per year: 0.39
Publication Metrics
by Dimensions ©
Articles citing this article
List of the papers citing this article based on CrossRef Cited-by.
Related Contents
iForest Similar Articles
Research Articles
Assessing the performance of MODIS and VIIRS active fire products in the monitoring of wildfires: a case study in Turkey
vol. 15, pp. 85-94 (online: 19 March 2022)
Review Papers
Remote sensing-supported vegetation parameters for regional climate models: a brief review
vol. 3, pp. 98-101 (online: 15 July 2010)
Review Papers
Accuracy of determining specific parameters of the urban forest using remote sensing
vol. 12, pp. 498-510 (online: 02 December 2019)
Review Papers
Remote sensing of selective logging in tropical forests: current state and future directions
vol. 13, pp. 286-300 (online: 10 July 2020)
Technical Reports
Detecting tree water deficit by very low altitude remote sensing
vol. 10, pp. 215-219 (online: 11 February 2017)
Research Articles
Fuel consumption comparison of two forwarders in lowland forests of pedunculate oak
vol. 12, pp. 125-131 (online: 11 February 2019)
Research Articles
Fuel characterization and crown fuel load prediction in non-treated Calabrian pine (Pinus brutia Ten.) plantation areas
vol. 15, pp. 458-464 (online: 03 November 2022)
Research Articles
Trends and driving forces of spring phenology of oak and beech stands in the Western Carpathians from MODIS times series 2000-2021
vol. 16, pp. 334-344 (online: 19 November 2023)
Research Articles
Remote sensing of Japanese beech forest decline using an improved Temperature Vegetation Dryness Index (iTVDI)
vol. 4, pp. 195-199 (online: 03 November 2011)
Research Articles
Calibration assessment of forest flammability potential in Italy
vol. 7, pp. 300-305 (online: 07 May 2014)
iForest Database Search
Search By Author
Search By Keyword
Google Scholar Search
Citing Articles
Search By Author
Search By Keywords







